Suunnittelu
Suunnitelu aloitetaan työstösovelluksesta. Käytettävät komponentit ja materiaalit vaihtelevat sen mukaan, millainen robotti on käytössä ja mitä sillä olisi tarkoitus työstää. Kun nämä on tiedossa, voidaan valita sopiva kara sekä siihen liittyvä elektroniikka.
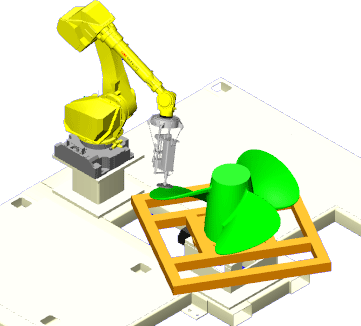
Karan sijainti ja suuntaus vaikuttavat robotin ulottuvuuteen. Jyrkkä suuntaus mahdollistaa paremman ulottuvuuden tasomaisiin kappaleisiin, mutta ahtaissa muotokappaleissa, loivempi kulma on eduksi.
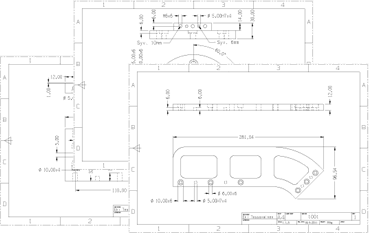
Osat suunnitellaan CAD ohjelmalla, jolla osista luodaan 3D-mallit sekä piirustukset. Ohjelmistolla voidaan tarkastella koko pakettia sekä luoda robotin simulointisovellukseen tarvittavat mallit.
Toteutus
Kun suunnitelmat ovat valmiina, voidaan tilata tarvittavat komponentit sekä koneistettavat osat. Koneistuksen hoitaa Wegera Oy jolta löytyy kokemusta tämän kaltaisten osien valmistuksesta. Kun komponentit ja osat ovat valmiina, ne tarkistetaan ja kasataan. Elektroniset osat kytketään ja tehdään tarvittavat asetukset.
Kun paketti on todettu toimivaksi, se puretaan ja toimitettaan asiakkaalle. Asiakkaan tehtäväksi komponettien kiinnitys, mutta sekin voidaan tarvittaessa tulla tekemään. Sähköliitännät hoitaa paikallinen ammattimies. Tällä menettelyllä saavutetaan selkeä kustannussäästö.

Ohjelmointi
Teen tarvittaessa työstöohjelmat asiakkaan kuvien perusteella. Ohjelmointia varten tarvitsen asiakkaalta 3D-mallin tai tarpeeksi tarkat piirustukset, joiden pohjalta malli voidaan luoda.
Ohjelmointi tehdään Mastercam- ja Robotmaster- sovelluksilla, joita edustan Zenex Computing Oy:ssä. Voin myös toimittaa tarvittavat ohjelmistot Zenexin kautta, jos asiakas haluaa ohjelmoida robotteja itsenäisesti, joka on toki suotavaa.
Lisätietoja Mastercamista: www.mastercam.fi
Lisätietoja Robotmasterista: www.robotmaster.fi